- Ideen sind unsere Kernkompetenz
- +49 7723/925-0
Positioniersystem H-Portal



- Produkttyp: Linearantriebe
- Download
- CAD-Daten: Positioniersystem H-Portal
- CAD-Daten: Nivellierelemente
- Betriebsanleitung
-
Allgemeine Informationen
-
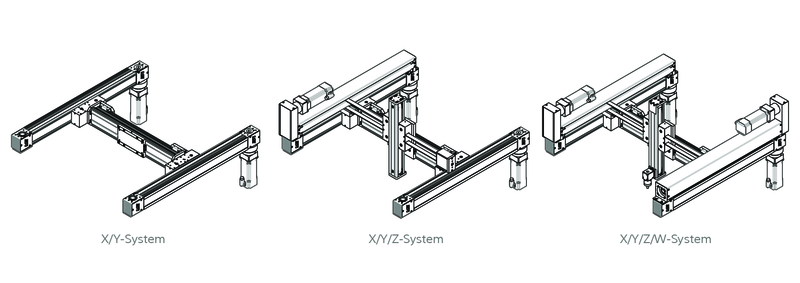
Es gibt 3 verschiedene Ausbaustufen des H-Protals
X/Y-System
Das X/X-System basiert auf den bewährten Lineareinheiten Modul 80/15 und Modul 115/42 bzw. Modul 115/42 B. Sie bilden die Basis des H-Portals.X/Y/Z-System
Das X/Y/Z-System kann mit der Lineareinheit Modul 60/33 zu einem Raumportal erweitert werden.X/Y/Z/W-System
Für anspruchsvolle Positionieraufgaben steht an der Z-Achse optional eine Dreheinheit zur Verfügung. -
Funktionsbeschreibung
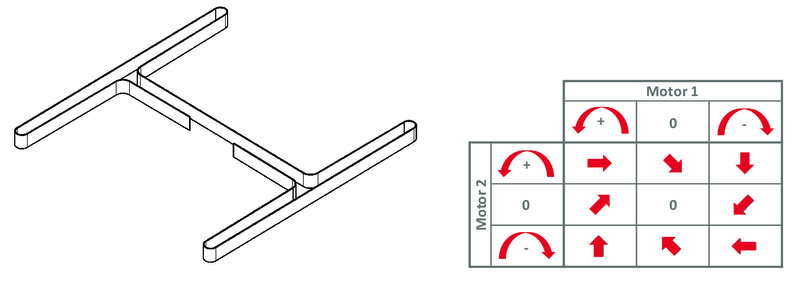
Beim X/Y-System ist der Riemen im H-Form angeordnet. Die Bewegungen in X- und Y-Richtung werden durch einen Riemen realisiert. Der Riemen wird am Schlitten der Y-Achse gespannt. Der Antrieb erfolgt an einer der 180°-Umlenkungen an der X-Achse. Für eine Fahrt in X-Richtung sind beide Motoren genau gegenläufig zu drehen. In Y-Richtung sind beide Motoren synchron zu drehen. Steht ein Motor, fährt das System unter 45°. Die Bewegungen in X und Y sind somit von beiden Motoren abhängig.
-
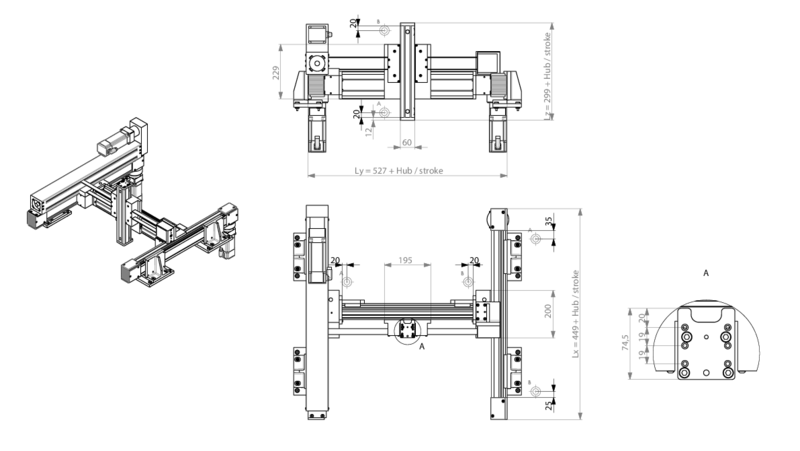
Technische Daten
Hub X (Hubabstufung 75 mm) 100 - 1525 mm Hub Y (Hubabstufung 60 mm) 100 - 700 mm Hub Z (Hubabstufung 40 mm) 110 - 550 mm Gewicht X/Y/Z System ca. 50 kg Bewegte Masse X/Y/Z System in X/Y/Z Richtung 30 / 13,5 / 5 kg Bewegte Masse X/Y System in X/Y Richtung 21 / 4,5 kg Gewichtzunahme pro 100 mm Hub Y-Achse 0,95 kg Gewichtzunahme pro 100 mm Hub Z-Achse 0,6 kg Empfohlenes Handhabungsgewicht (Hub, Motor und Getriebe abhängig) 4 kg Wiederholgenauigkeit +/- 0,05 mm Vorschubkonstante ohne Getriebe X/Y 140 mm / Umdrehung Vorschubkonstante ohne Getriebe Z 160 mm / Umdrehung Empfohlene Baugröße Servomotoren AM8032 -
Merkmale
- zum Antrieb aller Achsen werden weder Motor noch Kabel mitbewegt
- geringere zu verfahrende Masse - kürzere Taktzeiten
- kein Kabelverschleiß
- zeit- und damit kostensparender Aufbau durch Verzicht auf aufwendiges Energieführungssystem
- platzsparend
- schnelle und einfache Inbetriebnahme mit der Steuerung PA-CONTROL ipo
- Anbau Kundenspezifischer Motoren auf Anfrage
-
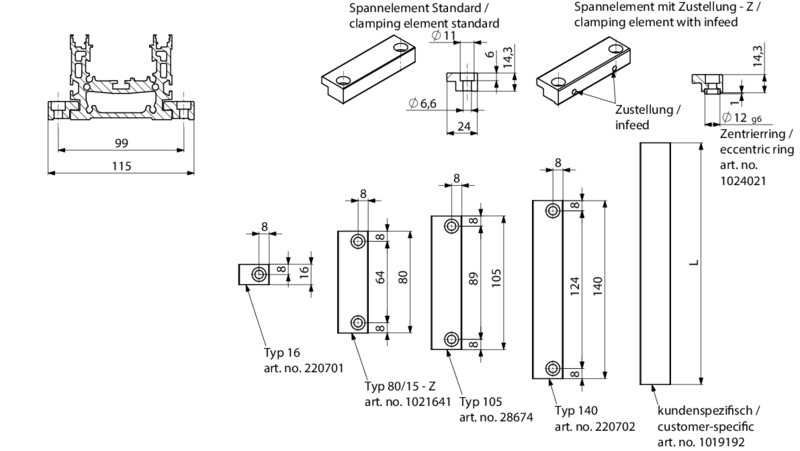
Zubehör: Spannelemente
-
Zubehör: Nivellierelemente

Diese Elemente eignen sich ideal zum Nivellieren von Montageflächen, welche mechanisch nicht oder nur mit sehr hohen Aufwand bearbeitet werden können. Weitere Informationen und hilfreiche Tutorials finden Sie hier.
-
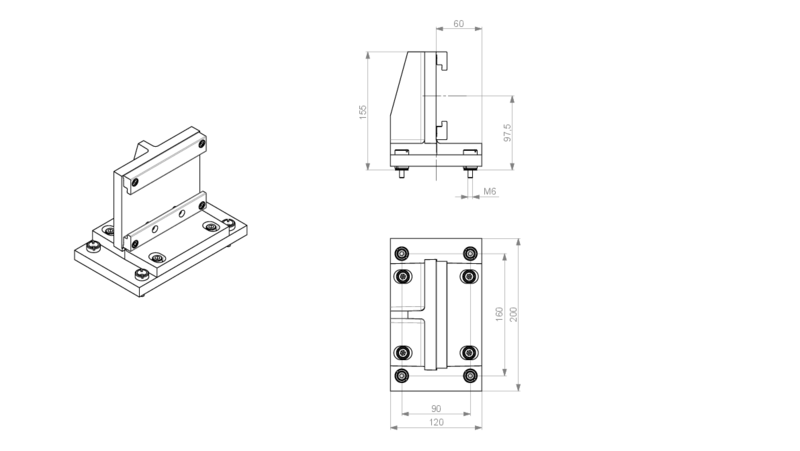
Zubehör: Montagewinkel mit Nivellierplatten